Robots in the Landscape: Prototyping Autonomous Adaptation
Workshop edit – video production by 6ix Films (Toronto, CA)
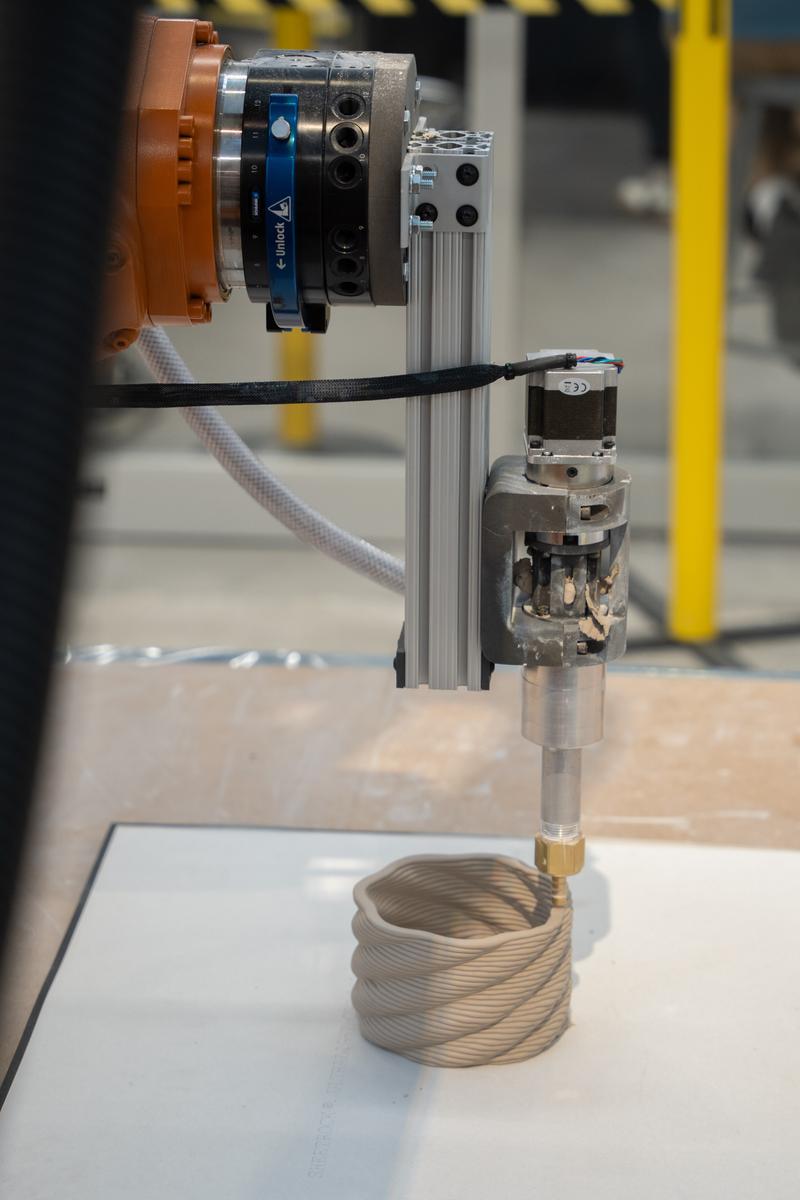
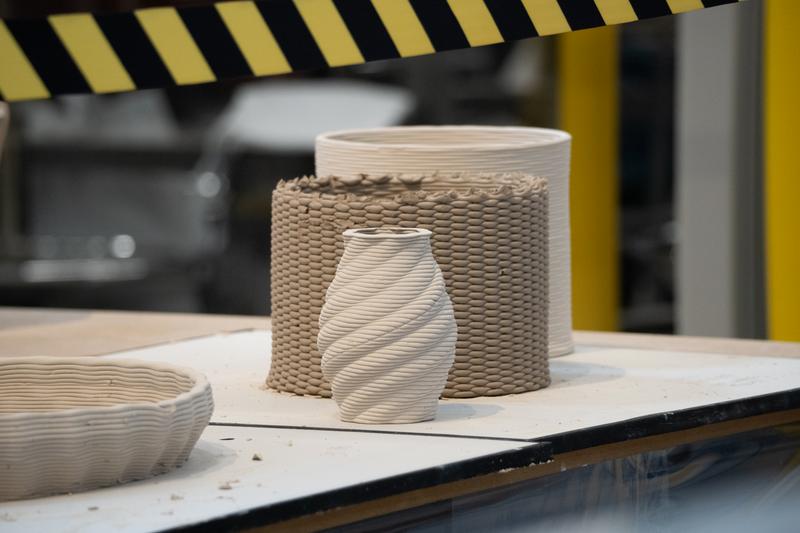
Tested clay robotic 3D printing, carving, cutting, and shaping methods for adaptive morphologies.
WORKSHOP LEADERS

Shelby Elizabeth Doyle
Iowa State University College of Design

Nathan King
Center for Design Research, Virginia Tech | Harvard University Graduate School of Design | Robotics and Autonomous Systems, UPenn Weitzman School of Design

Riley Studebaker
RPI School of Architecture | MetaOrnate | EDU Robotics











While design robotics have allowed new modes of practice, the tools enabling radical advances in what is considered possible, are often only used on the most expensive projects. While technology has rapidly become available to more people, our community seems to have forgotten the foundation. Where does one start in addressing this?
Using robotic clay depositioning as a framework for learning, this workshop provided a full introduction to design robotics as a step toward democratizing access. It aimed to break down the complexities of hardware and digital workflows so that emerging designers could manipulate materials. The workshop utilized Land Kit, along with accessible workflows and features that helped connect a Grasshopper‑based design process for Rhino and evaluated designs for performance and printing.
Students used robotic clay depositioning (clay 3D printing) to create a series of performative landscape design elements that ranged in scale and context, moving beyond architectural exuberance and exploring ways in which automation tools such as robotic printing might be applied in landscape, storm‑water management, public spaces, and more. This included printing full‑scale items—planters, bricks, tiles, paving pavers—as well as scaled models of larger landscapes.