Sculpting Space with On-Site Robotics: Digital and Physical Interoperability for Design, Fabrication, and Construction
Workshop edit – video production by 6ix Films (Toronto, CA)
Demonstrated reconciling digital models with variable field conditions using agile mobile fabrication platforms.
WORKSHOP LEADERS

Burçin Nalinci
A Zahner Co.

Luc Deckinga
Perkins&Will

Nathan Barnes
A Zahner Co.

Dan Rothbart
A Zahner Co.










Zahner and Perkins&Will, have been pioneering co-authoring tools and workflows to bridge information silos within the AEC industry. We presented a multi-track workshop that allowed participants to step into various roles, including surveyor, installer, designer, engineer, and fabricator.
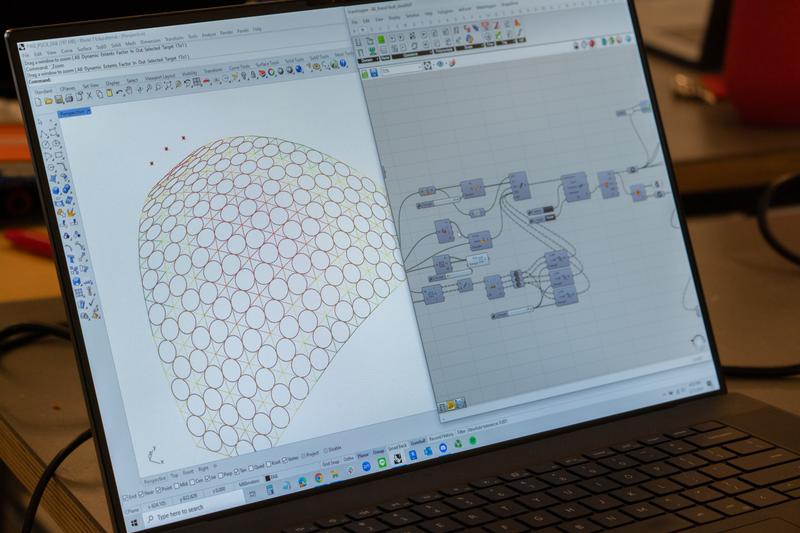
This immersive workshop explored diverse methods for seamless interaction between the digital and physical realms. It covered techniques for reconciling digital models with existing field conditions and delved into node‑based workflows, leveraging on‑site robotics, sensors, smart tools, and real‑time AR information delivery.
This workshop offered a unique opportunity to explore the heart of digital‑physical integration, encouraging creativity, innovation, and efficient collaboration in the AEC domain. It invited participants on an unforgettable journey into the future of construction and design.
Workshop Highlights:
- Site Selection and Scanning: We began by selecting a site—whether a column or ceiling—and used the cutting‑edge Leica MS60 3D scanner to capture precise data. After meticulous post‑processing, we employed the point clouds to drive our surface modeling.
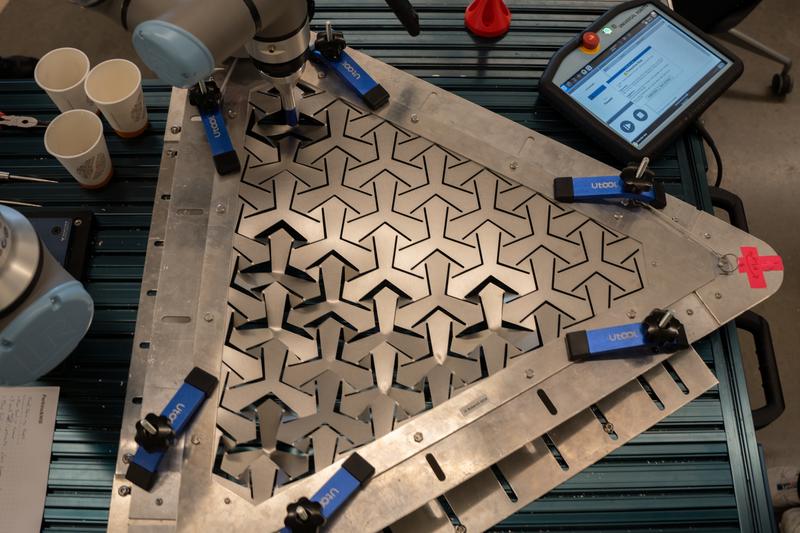
- Structure Design and Fabrication: Building on the surface model, we designed and fabricated a structure for our modular skin system with a strong emphasis on precision.
- Field Installation: Our proprietary field‑installation tool, SurveyLink, took center stage, ensuring precise placement of structural components according to the existing field conditions.
- Field Condition Updates: After the structure was installed, we conducted scans of the updated field conditions, which guided the aggregation and design of typical skin parts.
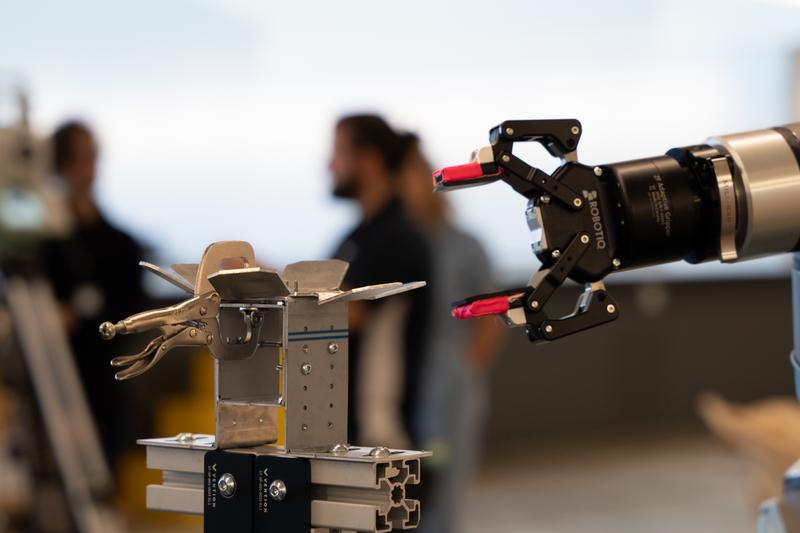
- Skin Assembly: With the skin model complete, we utilized SurveyLink, node‑based smart tools, and a robotic arm to position and assemble skin members accurately.