
Conference
Workshops
Hosts
Location
Registration
Schedule
Sponsors
May 21-23: WORKSHOPS
May 24-25: CONFERENCE

https://robotsinarchitecture.org/

Choreographing Cable Robots


WORKSHOP LEADERS

SOCIAL: @madeline.gannon
DESCRIPTION
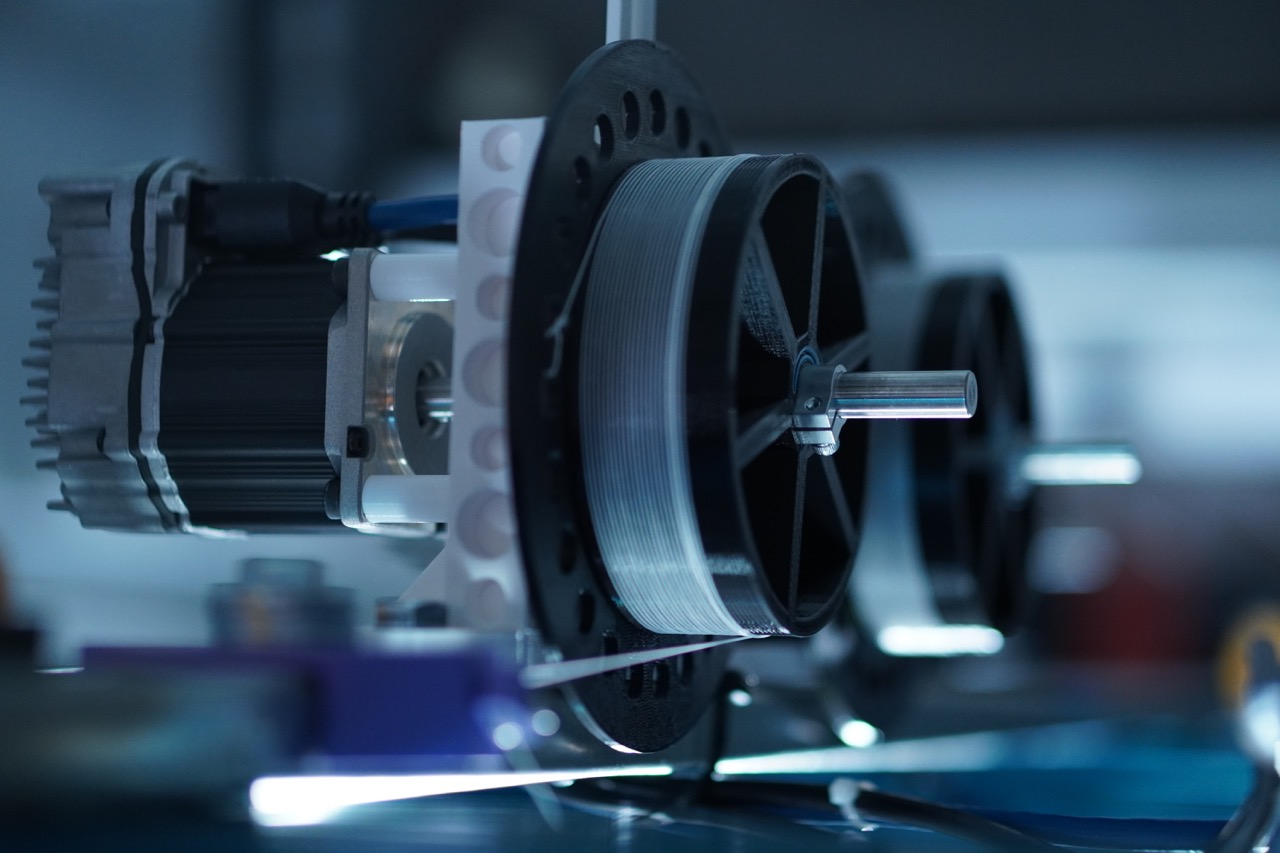
This workshop invites attendees to discover the anatomy, affordances, and creative opportunities that cable-driven robots can bring to architectural robotics. These underexplored machines can be combined to span bigger spaces, lift heavier things, and move just as precisely as industrial robots. However, their use has been limited because no off-the-shelf hardware solution exists, and they can be difficult to simulate and control.
In this workshop, we will bring our fleet of custom-built cable robots, interactive control software, and sensors to teach attendees how cable robots can be combined to create engaging 1D, 2D & 3D motion. Each attendee will learn how to connect their favorite development environment — such as Rhino/Grasshopper, Processing, TouchDesigner, Blender, Unity, Unreal Engine, Python, or C++ — to directly control these cablebots, and will create a unique, interactive experience to share with the group. Attendees will leave the workshop understanding the core design principles and challenges of working with cable-driven robots. They will also leave with a suite of tools and workflows for creating intuitive, interactive interfaces for their own use cases.
In this workshop, we will bring our fleet of custom-built cable robots, interactive control software, and sensors to teach attendees how cable robots can be combined to create engaging 1D, 2D & 3D motion. Each attendee will learn how to connect their favorite development environment — such as Rhino/Grasshopper, Processing, TouchDesigner, Blender, Unity, Unreal Engine, Python, or C++ — to directly control these cablebots, and will create a unique, interactive experience to share with the group. Attendees will leave the workshop understanding the core design principles and challenges of working with cable-driven robots. They will also leave with a suite of tools and workflows for creating intuitive, interactive interfaces for their own use cases.