
Conference
Workshops
Hosts
Location
Registration
Schedule
Sponsors
May 21-23: WORKSHOPS
May 24-25: CONFERENCE

https://robotsinarchitecture.org/

Exploring Centralization in Collective Robotic Construction

WORKSHOP LEADERS


SOCIAL: @icdstuttgart
DESCRIPTION
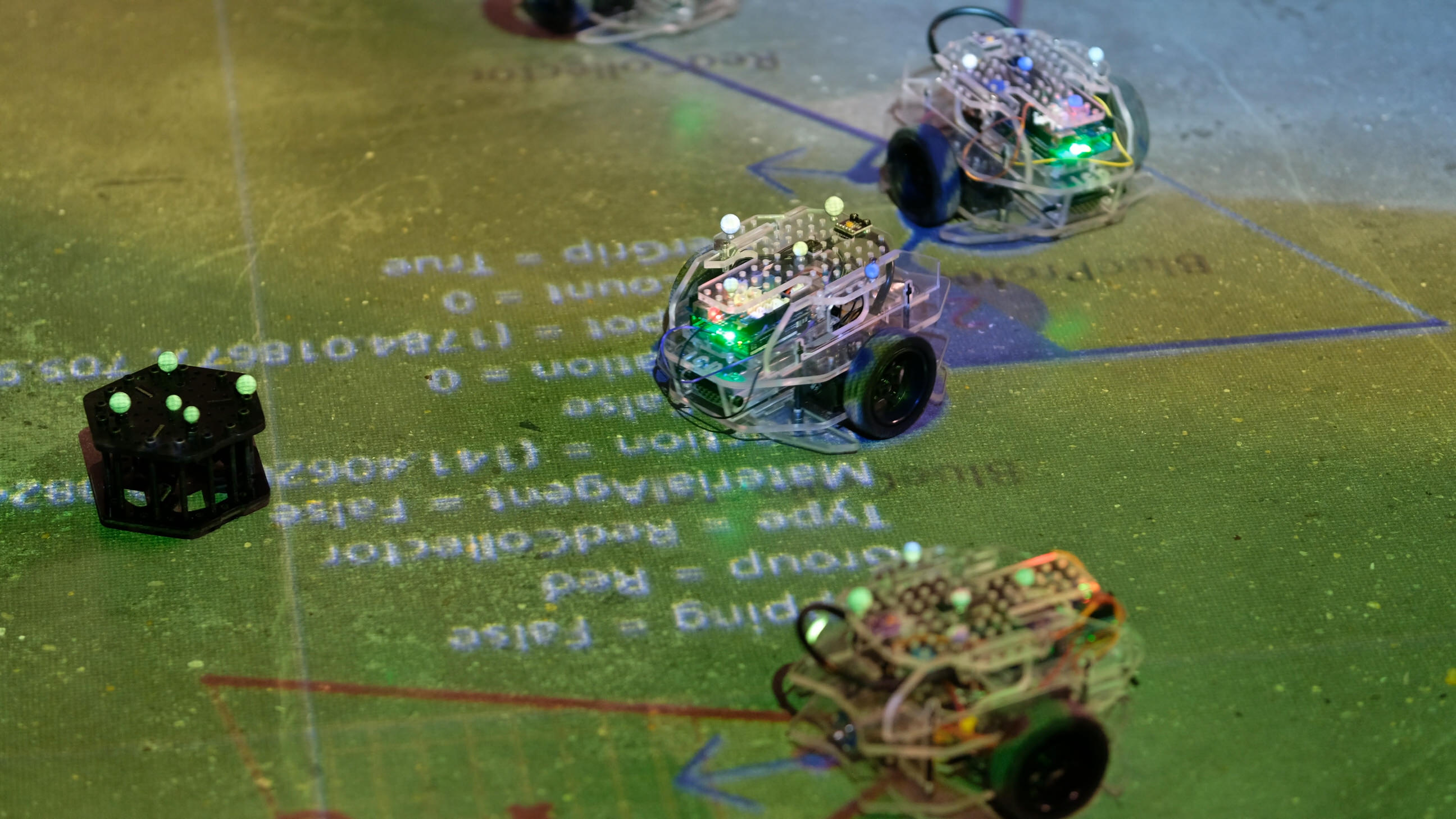
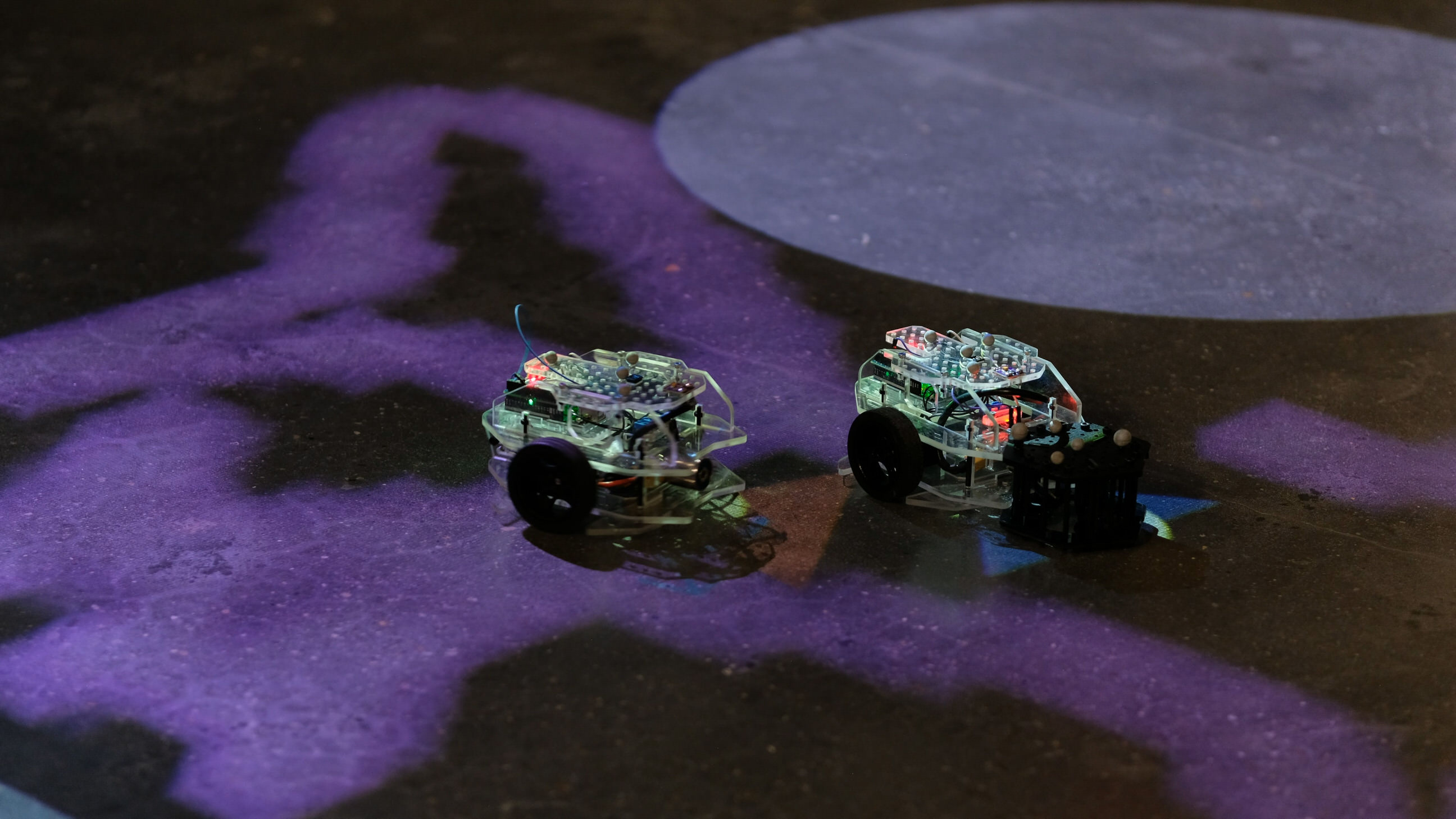
Collective robotic construction (CRC) is an emerging field of research that investigates how relatively small, mobile robots can collaborate in order to aid in construction processes. One major question in the development of CRC systems is their level of decentralization considering the large amount of machines that work together. This includes questions of:
-
Whether the robots know about and can communicate with each other?
-
Is the structure being assembled or worked on known by the robots?
-
How much information do the robots have on their general construction environment?
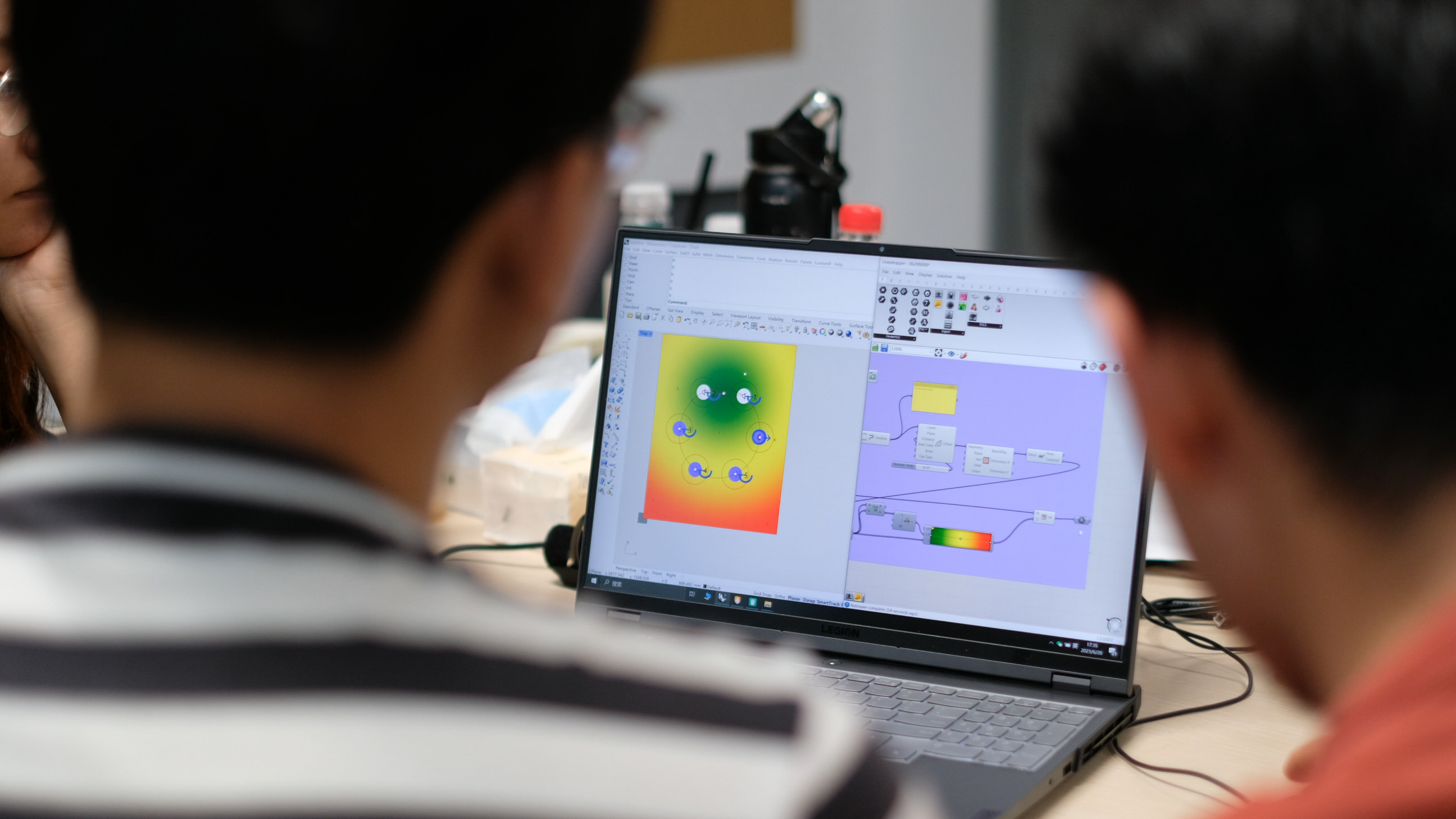
This workshop will tackle questions of decentralization in CRC through the investigation of two approaches for their modelling and control: agent-based modelling and simulation (ABMS) and digital threads. Participants will delve into theoretical concepts of CRC, explore a software framework for experimenting with CRC in which mobile robots are modelled as agents with custom behaviours and be introduced to a framework for design-to-fabrication processes based on digital threads. The participants will work digitally evolving existing algorithms for CRC, learn how to program and control wheeled mobile robots using the ABxM framework and advanced communication methods and have hands-on experience with local and global sensing techniques for mobile robots.
These tools and concepts will be utilized in the active implementation of a wheeled robot CRC system during the course of the workshop. By the end, participants will be equipped with the knowledge to envision and implement the transformative potential of CRC.
PREREQUISITES
- Proficiency Grasshopper for Rhino3D
- Previous experience programming required. C# is preferred and will be used during the workshop, but Python could suffice.